project: greetometer handshake trainer
Part of a series developed at the CBK Workgroup 2009 exploring how computer technology can help up to be more human.
concept overview
Computer technology is mainly used to perform tasks that most humans find difficult, e.g., repetitive processes, large calculations, accurate timing, etc. Most of us are quite happy for computers to take care of these jobs for us because we don't enjoy them and computers do them very well.
But there are other things that many humans find difficult and don't enjoy that are less logic-based and therefore not considered suitable jobs for computers. These are often things we consider to be deeply human. Can computers help us perform these tasks as well?
The aim of the Greetometer Handshake Trainer is to have computers to teach humans how to give better handshakes.
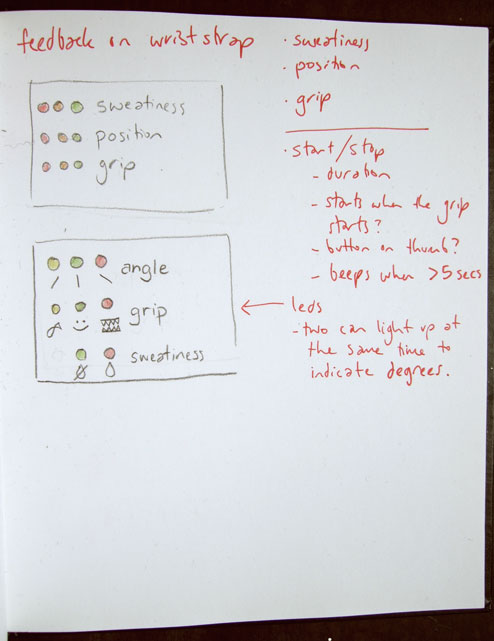
The Greetometer measures three aspects of the handshake: angle, grip and sweaty palms. Feedback for the angle (balance) is given via two small vibration motors on the back of the hand. The motors guide you to roll your hand clockwise or anti-clockwise. Feedback for grip is given audibly with a small piezo element. Grip too hard or too softly and the alarm sounds. Sweaty palms are measured on a colour range.
progress: finished!
The handshake glove - I'm calling it the "Greetometer" - is finished!
 embroidering the interface
embroidering the interface sewing the piezo element and icons
sewing the piezo element and icons finished balance icons
finished balance icons finished grip interface
finished grip interface finished sweaty palm colour guide
finished sweaty palm colour guide greetometer!
greetometer!
progress: started new prototype
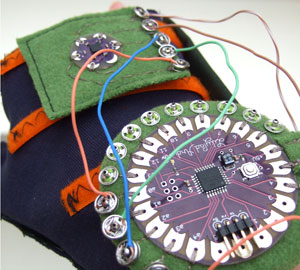
Here are a few photos of the embroidered circuitry of the new prototype:
 vibration motors on fabric backing
vibration motors on fabric backing vibration motors and accelerometer
vibration motors and accelerometer resistors, threads, etc
resistors, threads, etc arduino lilypad and battery board
arduino lilypad and battery board entire circuit so far
entire circuit so far
progress: back to the drawing-board
Progress on the handshake trainer was put on hold because I was focusing on the apology helmet. Now that it's finished, I'll be concentrating on the glove.
After a review with AnnaMariaCornelia, we decided to continue to make the glove a test for the wearer, not the second party in the handshake. This makes the wearable piece more "personal" and is more in line with the original concept: to have technology enchance human behaviour.
The glove will measure the handshake with three separate functions:
- A pressure sensor initiates the handshake process. It will then measure the wearer's grip. Feedback for initialisation and grip pressure will be audible.
- Accelerometer will test angle of hand. Vibration motors on back of hand will correct the angle.
- Skin conductivity (GSR) will be measured when the glove is switched on. Feedback does not have to be monitored during the handshake as this cannot be adjusted by the wearer. The feedback will be shown with an RGB-LED along a range from blue (cold, dry) to red (hot, sweaty).
progress: design
After a lot of thinking about this project, I think I might need to take a different direction. Here are some of the main problems I've encountered so far:
- difficult to fit the glove to wide range of hand sizes
- likewise difficult to position the sensors to fit a wide range of hand sizes
- with the GSR sensors, if these are on the inside of a glove, won't the hand become warm and sweaty because of the glove itself?
- glove should not inhibit human contact
I'm now considering whether the glove should perhaps test the handshake of the shakee rather than the shaker. Um... what I mean is that the feedback is provided not for the person wearing the glove, but the one who shakes the hand of the glove-wearer.
Not only does this make it a lot easier with fitting (I can make it a medium size with a bit of room for adjustment), it makes placing the pressure sensors easier. It also means that the electrodes won't be inside the glove in a potentially sweaty environment. But most importantly, it means that the person whose handshake is being tested will start in a more neutral state. In fact, they don't even have to know what the device is for until after their handshake has been tested. The glove will provide an un-biased assessment of how the handshake might be improved.
Below, some pics of the prototype:
 lilypad with accelerometer
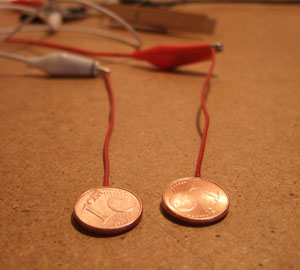
lilypad with accelerometer palm side up - 1 cent electrodes
palm side up - 1 cent electrodes
progress: design
After a few tests with the previous prototype, it became clear that the pressure from the handshake grip couldn't be accurately measured from across the palm. The grip should be tested across the fingers at approximately the middle joint. More testing is required for this, but I've built a new prototype to start gathering data. I'm hoping to be able to test for sweatiness across the palm by measuring the galvanic skin response with electrodes.
 pocket on end for fingers
pocket on end for fingers lilypad accelerometer already in place
lilypad accelerometer already in place green patch is pressure sensor
green patch is pressure sensor
progress: development
Awesome! I just made a GSR (Galvanic Skin Response) sensor following these guidelines: http://cwwang.com/2008/04/13/gsr-reader/. I didn't bother wading through his Processing code, just tried it out with the standard Arduino AnalogInput sketch and I'm getting readings dependent on the humidity levels of my skin! Needs testing and calibration, of course, but still very exciting. Plus, the electrodes only cost one euro-cent each!
progress: design
I've looked into how the handshake trainer (helping hand?) can best be designed:
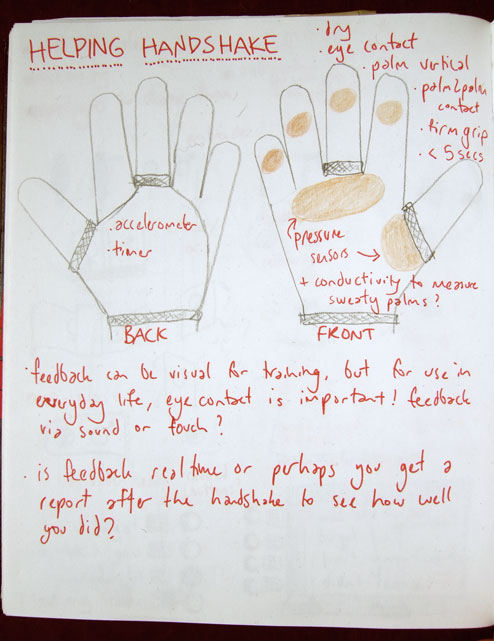
The main conflict between the design and the research is that eye-contact is considered as much a part of the handshake as anything else. This means it won't be a good idea to have the feedback "realtime" as i originally wanted. The handshake trainer will now "record" your handshake and then give you a report on how you did.
It should control:
- dryness of skin
- pressure of grip
- angle of hand
- duration of handshake - audio feedback
Here is the first prototype of the basic design. I will now try this on as many different sized hands as possible to make sure it can be worn by a wide range of people.
 notice ring finger elastic strap
notice ring finger elastic strap feedback can be read like a watch
feedback can be read like a watch is strap across palm enough?
is strap across palm enough?
progress: handshake research
Of course there's a bunch of stuff online about how to give a good handshake. This one is pretty funny and could definitely be understood by a computer. :)
- Meet someone.
- Put your hand down in a relaxed fashion.
- Outstretch your hand.
- Firmly, but not to tightly, grasp their hand.
- Hang on for maybe 3 or 4 seconds. Any less would be too brief and any more would be too long.
- Calmly release the other persons hand. Don't do it too abruptly.
- Calmly take your hand back to your side.
- Have a conversation with that person.
From: http://www.wikihow.com/Give-a-Good-Handshake
Anyway, it's generally agreed that the characteristics of a good handshake include:
- a dry hand
- eye contact + smile
- palm vertical, thumb pointing up
- palm to palm contact - the "web" between your thumb and pointer finger should touch theirs
- a firm grip adjusted for the other person's grip (not too hard, not too limp)
- shake up and down no more than twice for less than 5 seconds
http://www.ehow.com/how_5014203_shake-someones-hand-properly.html
http://www.sideroad.com/Business_Etiquette/handshake-etiquette.html